Onderzoeker Daniël Karssen bouwde hiervoor de robot Phides en promoveerde onlangs op dit onderwerp aan de TU Delft, die qua looprobots tot de wereldtop behoort. “Het begrijpen van de menselijke loopbeweging is noodzakelijk voor de ontwikkeling van hulpmiddelen die gehandicapte mensen laten lopen, zoals loopprotheses, en voor hulpmiddelen die gezonde mensen beter laten lopen”, zegt Karssen.
“Deze hulpmiddelen worden nu al wel ontwikkeld, maar het ontbreekt nog aan fundamenteel inzicht in de loopbeweging. Een grote onbekende factor vormen verstoringen, zoals een onverwachte duw of hoogteverschillen in de ondergrond.”
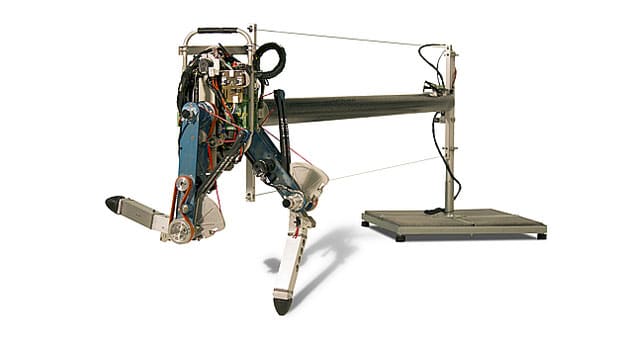
Karssen benadrukt dat Phides pas een allereerste stap is op weg naar echt lopende robots. Zo zit Phides nog vast aan een middelpunt met een ‘boom’ en ook de torso kan nog niet roteren. “Dit doen we om het geheel in het begin nog overzichtelijk te houden. Maar uiteindelijk zullen we echt rennende robots kunnen maken, al kan dat nog geruime tijd duren.”

